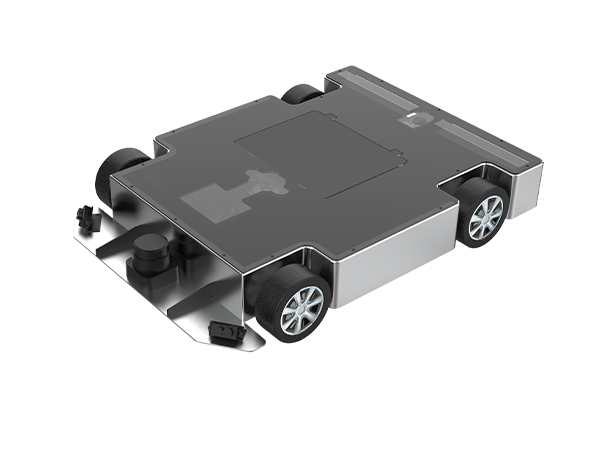
The Seenboom undercarriage robot uses an area array scanning camera to image the vehicle chassis. Users can control the robot through the intelligent wireless control terminal to view the entire chassis image and real-time pictures under the vehicle, which is convenient for timely detection of illegal acts such as suspicious objects being hidden under the vehicle and modifications.

The Seenboom undercarriage robot uses an area array scanning camera to image the vehicle chassis. Users can control the robot through the intelligent wireless control terminal to view the entire chassis image and real-time pictures under the vehicle, which is convenient for timely detection of illegal acts such as suspicious objects being hidden under the vehicle and modifications.
The vehicle underbody inspection robot is mobile and portable, and does not require driver cooperation. It features and functions such as no need for supporting facilities, one-click inspection, automatic license plate recognition, clear display of the entire vehicle bottom image, and fixed-point observation at designated positions. It is suitable for highway checkpoints, customs border defense, large-scale events, and important areas Temporary or short-term vehicle control and inspection at venues such as conference security.
 One-click power on/off
One-click power on/off
The robot body is equipped with a one-button on/off function
 Wireless transmission
Wireless transmission
It is equipped with wireless transmission links for images, videos and control (robots can generate)wifi"Hot Topic
 Easy to disassemble
Easy to disassemble
The battery can be conveniently disassembled and replaced. It can be charged through the interface of the robot body or taken out for charging
 Handheld terminal
Handheld terminal
The automatic centering driving task can be performed with one click through the handheld terminal and returned to the front of the vehicle (suitable for small, medium and large passenger and freight vehicles).
 Intuitive operation interface
Intuitive operation interface
PADIt features an intuitive operation interface and is easy to use
 Real-time data feedback
Real-time data feedback
Provide real-time position data of the robot relative to stationary vehicles
 Telemetry data
Telemetry data
Telemetry data control reception
 Real-time data storage
Real-time data storage
The test data of the vehicle underbody inspection robot is stored in real time
|
Serial number |
Project |
Parameter |
Remarks |
|
|
1 |
Task payload related |
Installation dimensions of the mission payload |
250*250*70mm |
|
|
2 |
Installation height of the mission payload |
20mm |
Relative to the ground |
|
|
3 |
Parameters of the airborne industrial control computer |
The tenth generationI5 "Operation and storage"8G USB3.0 Gigabit network card WIFI 6 |
|
|
|
4 |
Load power supply |
Reserved12V10A |
|
|
|
5 |
Basic parameters |
Overall machine dimensions |
550*350*92mm |
|
|
6 |
Robot chassis height |
20mm |
|
|
|
7 |
Vehicle body weight |
≤20kg |
|
|
|
8 |
Hub diameter |
90±3mm |
|
|
|
9 |
Main performance parameters |
Obstacle-crossing ability |
≤20mm |
|
|
10 |
Climbing ability |
"Maximum30° |
|
|
|
11 |
Battery parameters |
24V/15Ah |
|
|
|
12 |
Continuous working time |
≥4h |
Support battery replacement |
|
|
13 |
Image storage space |
100G |
|
|
|
|
|
|
|
|
|
14 |
Working temperature |
-20~+55℃"Charge0Above degrees |
Customizable-45~+70℃ |
|
|
15 |
Driving mode/Turning radius |
4Differential steering is available and it can stay in place360°Rotation |
|
|
|
16 |
Moving speed |
0.05m/s-1m/s |
|
|
|
|
Parameters of the camera module under the vehicle |
General sensor types |
1/1.7" CMOSGlobal shutter |
|
|
|
Frame rate |
1500fps |
|
|
|
|
Agreement |
GigE |
|
|
|
|
Resolution |
1624*1240 |
|
|
|
Environment |
Temperature |
Relative humidity |
|
The working environment of this system |
-20℃~55℃ |
<60% |
|
The storage environment of this system |
-25℃~60℃ |
<80% |

Service Hotline400-661-6686

to addressBuilding C, Qilu Software Park, Shunhua Road, Jinan Area of China (Shandong) Pilot Free Trade Zone

Email addresszhangwenyu@seenboom.com
 Scan the code to follow the official account
Scan the code to follow the official account
 Scan the code and add me on wechat
Scan the code and add me on wechat